What are the Torque Slip Characteristics of Induction Motor?

What are the Torque Slip Characteristics of Induction Motor?
Torque Slip Characteristics Definition
The torque slip characteristics of an induction motor describe how its torque changes with slip.

Slip
Slip is the difference between synchronous speed and actual rotor speed, divided by synchronous speed.
The torque-slip characteristic curve can be divided roughly into three regions:
Low slip region
Medium slip region
High slip region
Motoring Mode
In motoring mode, the motor runs below synchronous speed with torque proportional to slip.
Generating Mode
In generating mode, the motor runs above synchronous speed, needing external reactive power to generate electricity.
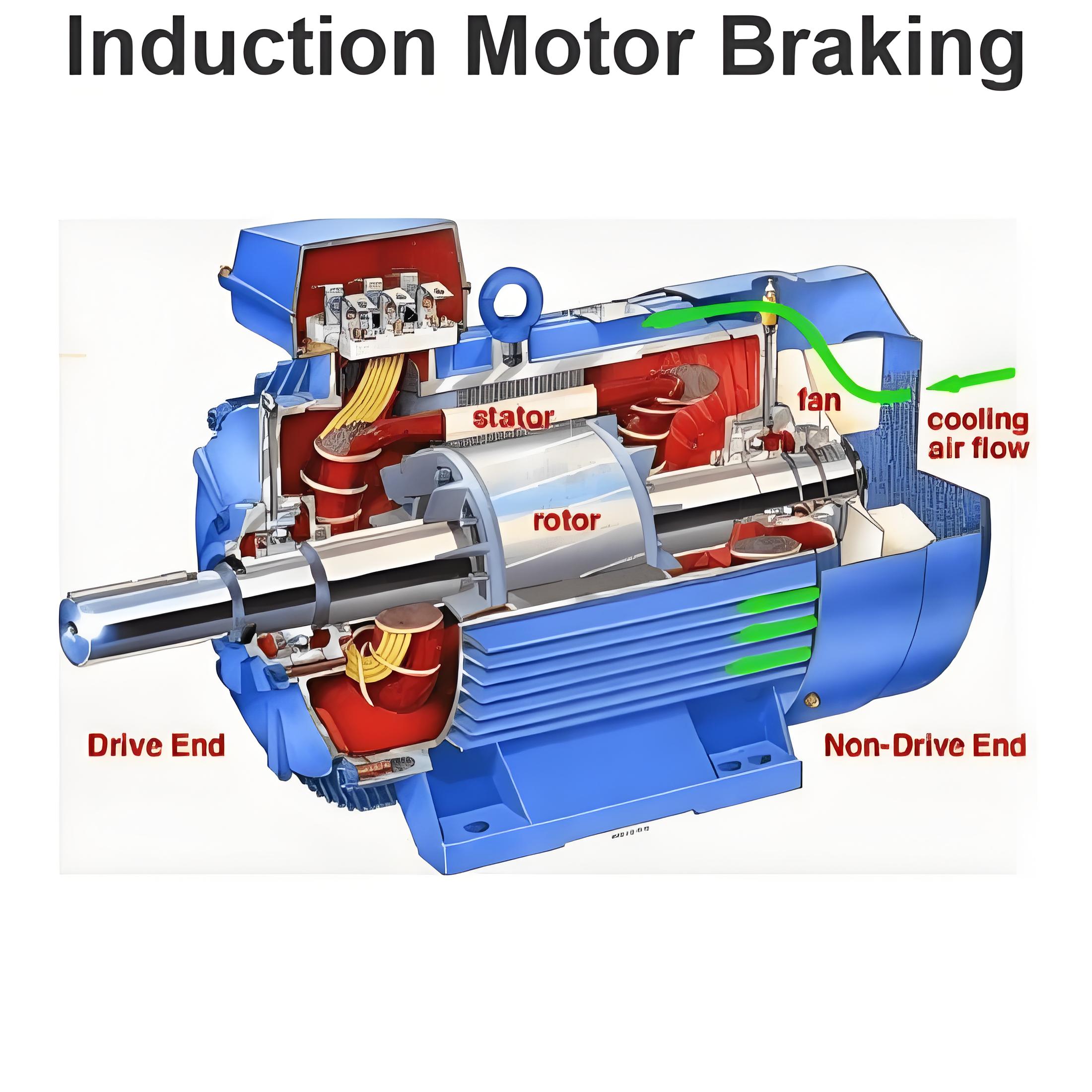
Braking Mode
Braking mode stops the motor quickly by reversing its direction, dissipating kinetic energy as heat.
Torque Slip Characteristics of Single Phase Induction Motor

At a slip of one, forward and backward fields in a single-phase induction motor create equal but opposite torques, resulting in zero net torque, so the motor fails to start. Unlike three phase induction motor, these motors are not self-starting and need an external method to provide starting torque. Increasing the forward speed decreases forward slip, increasing forward torque and decreasing reverse torque, thus starting the motor.
The Electricity Encyclopedia is dedicated to accelerating the dissemination and application of electricity knowledge and adding impetus to the development and innovation of the electricity industry.